

Star-Delta Starter
STAR-DELTA STARTER
INTRODUCTION:
Most induction motors are started directly on line, but when very large motors are started that way, they cause a disturbance of voltage on the supply lines due to large starting current surges. To limit the starting current surge, large induction motors are started at reduced voltage and then have full supply voltage reconnected when they run up to near rotated speed. Two methods are used for reduction of starting voltage are star delta starting and auto transformer stating.
WORKING PRINCIPAL OF STAR-DELTA STARTER:
-
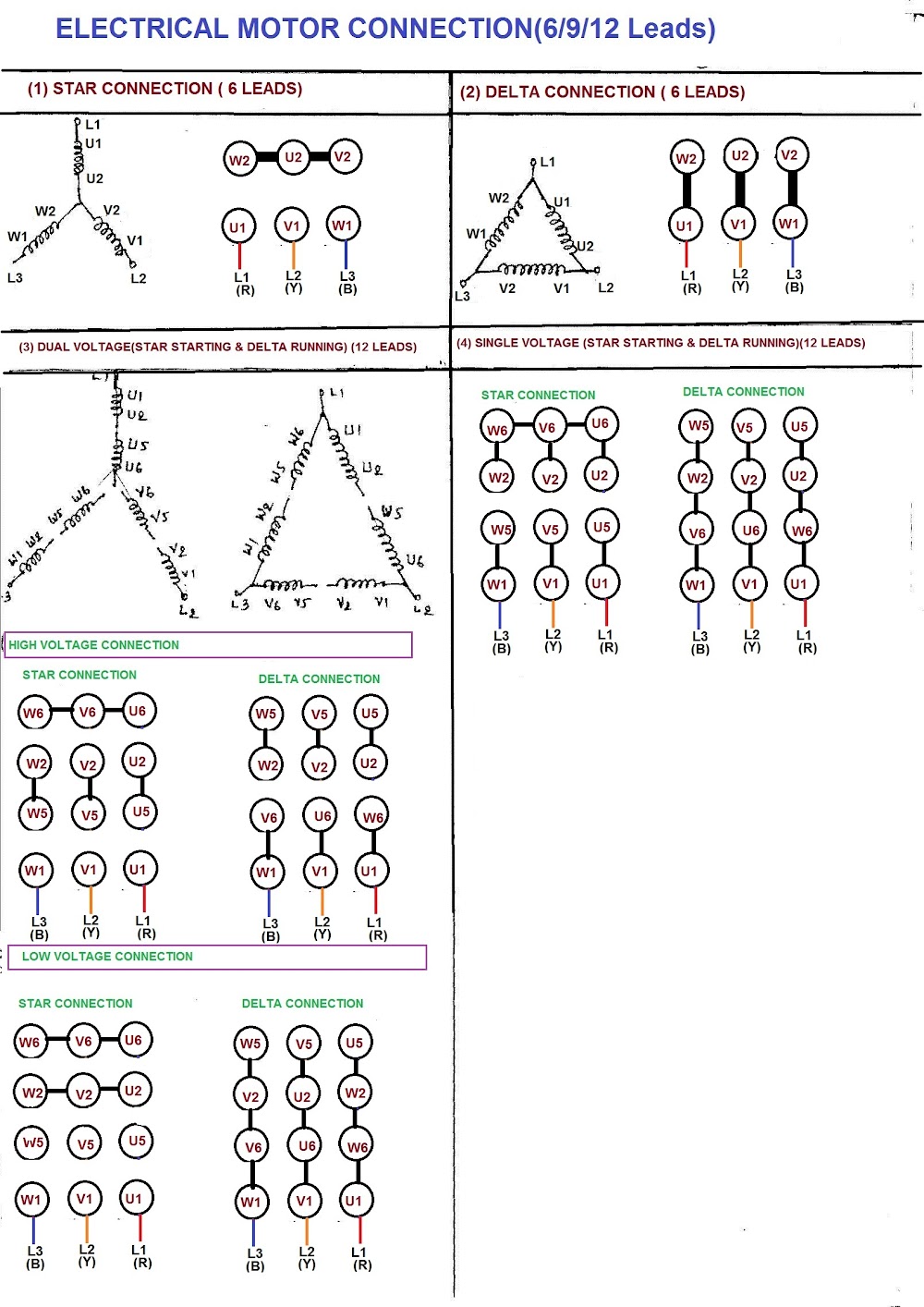
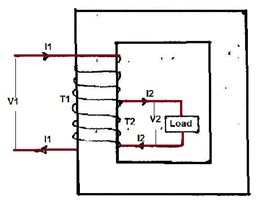
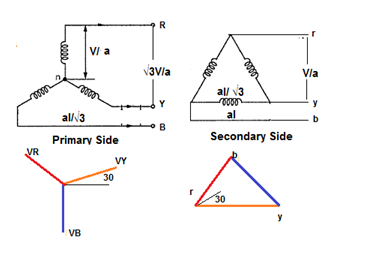
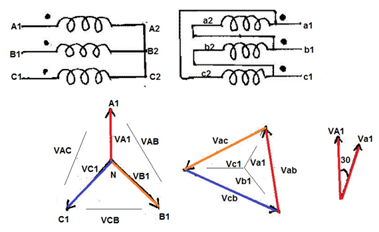
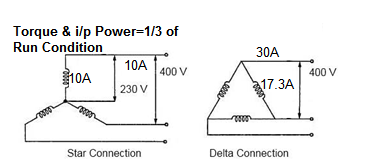
This is the reduced voltage starting method. Voltage reduction during star-delta starting is achieved by physically reconfiguring the motor windings as illustrated in the figure below. During starting the motor windings are connected in star configuration and this reduces the voltage across each winding 3. This also reduces the torque by a factor of three. After a period of time the winding are reconfigured as delta and the motor runs normally.
-
Star/Delta starters are probably the most common reduced voltage starters. They are used in an attempt to reduce the start current applied to the motor during start as a means of reducing the disturbances and interference on the electrical supply. * Traditionally in many supply regions, there has been a requirement to fit a reduced voltage starter on all motors greater than 5HP (4KW). The Star/Delta (or Wye/Delta) starter is one of the lowest cost electromechanical reduced voltage starters that can be applied. * The Star/Delta starter is manufactured from three contactors, a timer and a thermal overload. The contactors are smaller than the single contactor used in a Direct on Line starter as they are controlling winding currents only. The currents through the winding are 1/root 3 (58%) of the current in the line. * There are two contactors that are close during run, often referred to as the main contractor and the delta contactor. These are AC3 rated at 58% of the current rating of the motor. The third contactor is the star contactor and that only carries star current while the motor is connected in star. The current in star is one third of the current in delta, so this contactor can be AC3 rated at one third (33%) of the motor rating.
STAR-DELTA STARTER CONSISTS FOLLOWING UNITS:
-
Contactors (Main, star and delta contactors) 3 No’s (For Open State Starter) or 4 No’s (Close Transient Starter).
-
Time relay (pull-in delayed) 1 No.
-
Three-pole thermal over current release 1No.
-
Fuse elements or automatic cut-outs for the main circuit 3 Nos.
-
Fuse element or automatic cut-out for the control circuit 1No.
POWER CIRCUIT OF STAR DELTA STARTER:
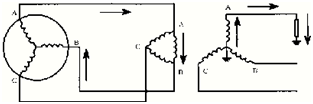
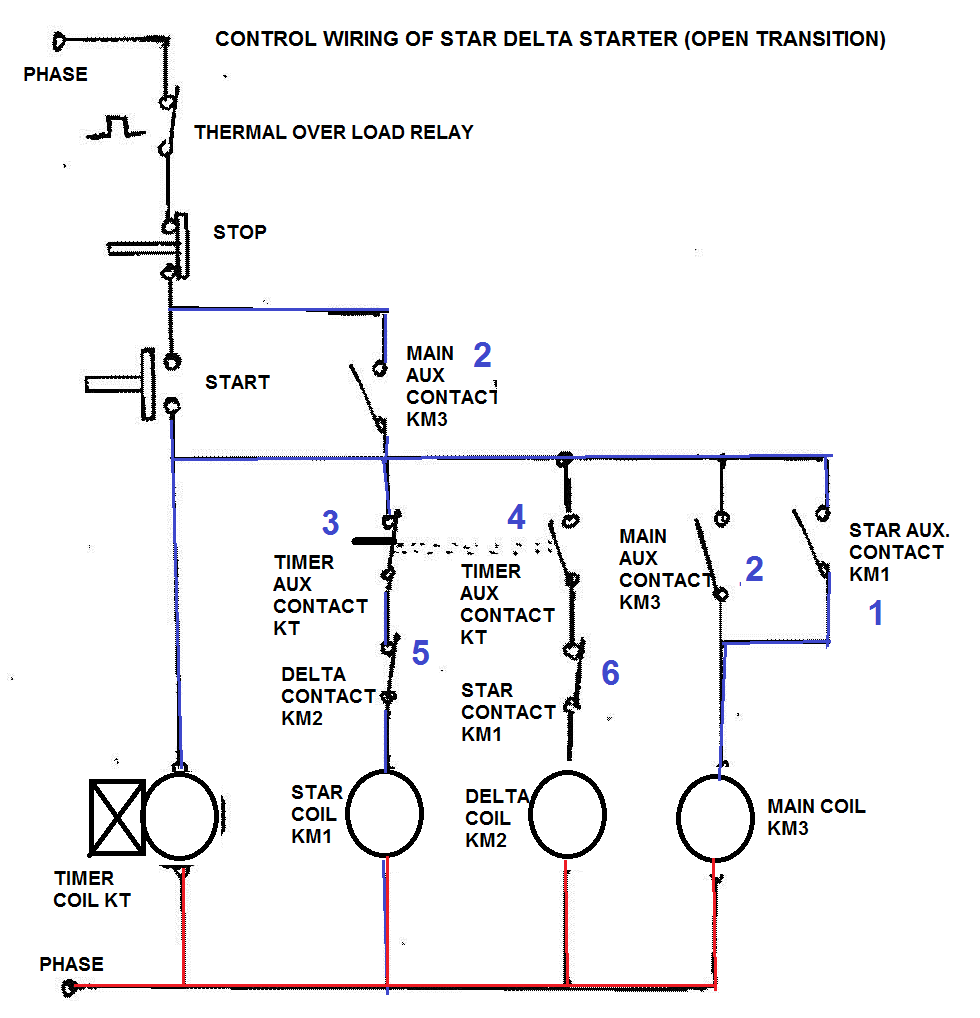
- The main circuit breaker serves as the main power supply switch that supplies electricity to the power circuit. * The main contactor connects the reference source voltage R, Y, B to the primary terminal of the motor U1, V1, W1. * In operation, the Main Contactor (KM3) and the Star Contactor (KM1) are closed initially, and then after a period of time, the star contactor is opened, and then the delta contactor (KM2) is closed. The control of the contactors is by the timer (K1T) built into the starter. The Star and Delta are electrically interlocked and preferably mechanically interlocked as well. In effect, there are four states:
Y-D
- The star contactor serves to initially short the secondary terminal of the motor U2, V2, W2 for the start sequence during the initial run of the motor from standstill. This provides one third of DOL current to the motor, thus reducing the high inrush current inherent with large capacity motors at startup. * Controlling the interchanging star connection and delta connection of an AC induction motor is achieved by means of a star delta or wye delta control circuit. The control circuit consists of push button switches, auxiliary contacts and a timer.
CONTROL CIRCUIT OF STAR-DELTA STARTER (OPEN TRANSITION):
- The ON push button starts the circuit by initially energizing Star Contactor Coil (KM1) of star circuit and Timer Coil (KT) circuit. * When Star Contactor Coil (KM1) energized, Star Main and Auxiliary contactor change its position from NO to NC. * When Star Auxiliary Contactor (1)( which is placed on Main Contactor coil circuit )became NO to NC it’s complete The Circuit of Main contactor Coil (KM3) so Main Contactor Coil energized and Main Contactor’s Main and Auxiliary Contactor Change its Position from NO To NC. This sequence happens in a friction of time. * After pushing the ON push button switch, the auxiliary contact of the main contactor coil (2) which is connected in parallel across the ON push butto…